
So what's the big difference between a stepper and a servo?
It's about the poles.
A pole is an area of a motor where a North or South magnetic pole is generated either by a permanet magnet or by passing current through the coils of a winding.
Servos have between 4 and 12 poles. Stepper motors have between 50 and a hundred.
Steppers don't require encoders since they can accurately move between their many poles. Whereas servos, with few poles, require an encoder to keep track of their position. Steppers simply move incrementally using pulses, while servo's read the difference between the motors encoder and the commanded position, and adjust the current required to move.
It's about the poles
You stole much of the above from a very good Stepper v Servo explanation from AMCI, which makes stepper systems. What you like about it is that it paints a vivid portrait of a stepper motor accurately moving between a forest of poles, notching it's way around, and ready to stop on a precise step.
You find your way to the AMCI after a number of Cambridge Hackspace guys mentioned, politely, "you really should move up to a stepper motor." It would come up, inevitably, after the servo at the center of the gumball machine started chattering or balking or jamming.
Also the first time you talk to Jack Greenfield about a new version of the Mixed Reality Gumball Machine, and you mention stepper motors, he was like, "Oh yeah, you're going to want to use a stepper."
Sold.
Basically, it's simpler to be accurate with a stepper motor, compared to a servo. A servo, which needs an encoder, basically needs to remember where it was, and calculate what it has to do to get to the new position.
A stepper motor just goes there.
Here are some more helpful resources:
- https://www.youtube.com/watch?v=pbAqaD0ej14
- https://www.linkedin.com/in/thetechstop
- https://twit.tv/people/fr-robert-ballecer-sj
- https://www.ncronline.org/news/people/digital-jesuit-host-shows-tech-focused-podcasting-network
- https://www.siprep.org/page.cfm?p=7021
Here's the stepper motor that Evan Rust recommended.

A stepper needs an additional piece of hardware: a "controller board." Evan's recommendation: a Polulu board, below.
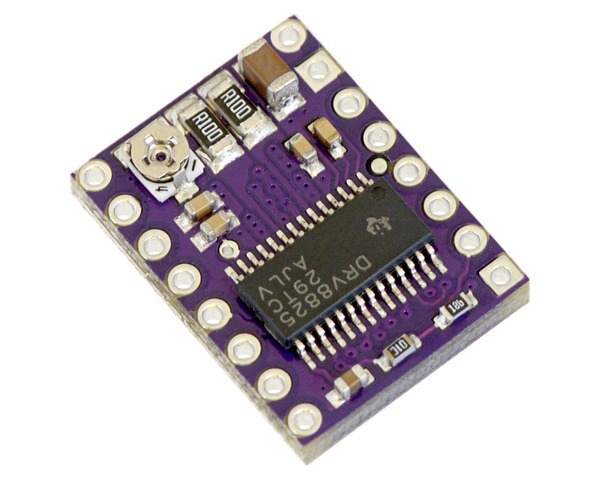
More on stepper boards next time.